Class Description
We build NXTs, We used many sensor to do this. For example touch, light, and sound sensor to name a few. We had to make it go and find it's way in a maze a get a ball across the finish line. I made battle robot in Battle Bots. For that we have to make the
robot pop a balloon attached to somebody's NXT. This was my favorite class next to computer
robot pop a balloon attached to somebody's NXT. This was my favorite class next to computer
|
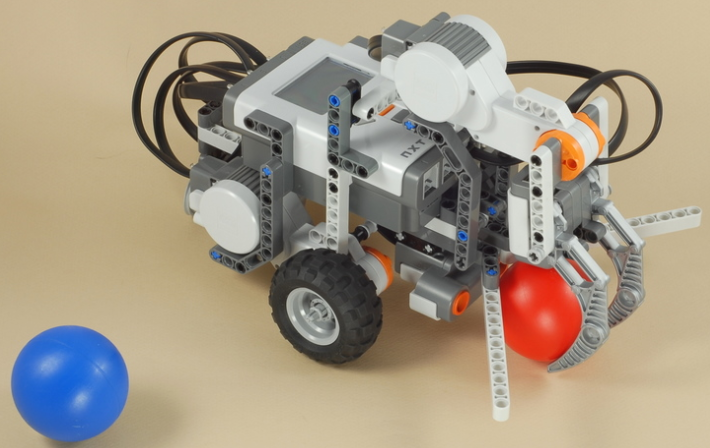
Red Ball Blue Ball
The red ball blue ball project was our latest robotics project. It was just like our maze project, but the robot has to capture one of the balls, read it with the light sensor, and take it to the right place. This project took a lot of programming, and engineering. It was the most challenging project this year. I really miss this project. |
Hackey Sack Rescue

In robotics, we made a robot and programmed it to do what we wanted. We recently programmed it to make it through a maze. To do this, different sensors were used. We used the motors, the sensor,
and the ultrasonic sensor. The robot made it through the maze and captured the hacky sack. I ended up getting a perfect score which made me really happy.
and the ultrasonic sensor. The robot made it through the maze and captured the hacky sack. I ended up getting a perfect score which made me really happy.
